Accurate FLASH delivery requires motion monitoring – SGRT is a feasible option for canine patients
Annika Mannerberg,
Sweden
PO-1711
Abstract
Accurate FLASH delivery requires motion monitoring – SGRT is a feasible option for canine patients
Authors: Annika Mannerberg1, Elise Konradsson1, Anneli Edvardsson2, Malin Kügele1,2, Mustafa Kadhim2, Crister Ceberg1, Kristoffer Petersson2,3, Hanna-Maria Thomasson2, Maja L. Arendt4, Betina Børresen4, Kristine Bastholm Jensen5
1Lund University, Medical Radiation Physics, Lund, Sweden; 2Skåne University Hospital, Department of Hematology- Oncology and Radiation Physics, Lund, Sweden; 3University of Oxford, MRC Oxford Institute for Radiation Oncology, Department of Oncology, Oxford, United Kingdom; 4University of Copenhagen, Department of Veterinary Clinical Sciences, Fredriksberg, Denmark; 5Veterinärhuset Öresund, Limhamn, Malmö, Sweden
Show Affiliations
Hide Affiliations
Purpose or Objective
In ultra-high dose rate radiotherapy, i.e., FLASH radiotherapy (FLASH RT), treatments are often delivered at a reduced source to surface distance (SSD) compared to conventional radiotherapy. The fast treatment largely reduces the intrafractional motion. However, it is crucial to have proper motion management to ensure accurate delivery of the high fraction dose. Surface guided radiotherapy (SGRT) offers real time motion monitoring with a large field of view (FOV). The aim of this study was to investigate the performance of the surface imaging (SI) system using a phantom to simulate breathing canine patients in a FLASH RT setting, including the challenges involving furry surfaces and an off-isocentric setup. Further we aimed to analyze the real time motion data from 11 canine patients treated with FLASH RT at SSD 70 cm.
Material and Methods
The measurements and treatments were performed at a clinical linear accelerator (Precise, ELEKTA) modified for FLASH RT. A single camera CatalystTM (C-Rad Positioning AB) was used for motion monitoring. A phantom was created by placing furlike materials in grey and black on a QUASARTM Respiratory Motion Phantom (Modus Medical Devices). A circular region of interest was placed on the surface to track the motion in the SI system. A sinusoidal breathing motion with 15 breaths per minute and an amplitude of 10 mm in the vertical (vrt) direction was used. The amplitude calculated by the SI system was measured at SSD 70 cm, and verified at SSD 100 cm. The SI system’s capability of detecting sudden movements or drifting motion was determined for both SSDs by moving the couch between 2 and 18 mm in the lateral (lat), longitudinal (lng) and vrt direction. The system’s ability to accurately determine shifts for objects with loss of surface coverage due to shielding was also investigated. The SI system was used for motion monitoring during FLASH RT for 11 canine patients. On average 30 Gy was delivered in 66 ms during one fraction. The patients were monitored from the finalized setup in the treatment room until after the treatment was delivered.
Results
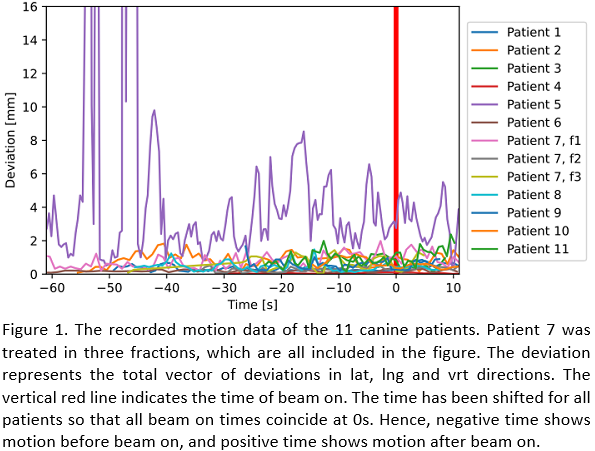
For grey fur an amplitude of 10.6 mm was measured by the SI system in both SSD 70 and 100 cm. For black fur the measured amplitude was 9.7 and 10.2 mm for SSD 70 and 100 cm, respectively. For both fur colours and SSDs, the difference between the couch shifts in lat, lng and vrt and the displayed calculated shifts by the SI system was within 1 mm. However, for the phantom with inferior surface coverage, differences up to 2 mm were detected at SSD 70 cm. All patients but one moved less than 2 mm during beam on (Figure 1). Patient 5 had the largest measured motion and the poorest surface coverage.
Conclusion
We have demonstrated that SI in a FLASH RT setting is feasible for motion monitoring of canine patients with fur. SGRT proved to be important for verification of maintained patient position, with the capability of monitoring in off-isocentric treatments.