Evaluating semi-automated 18F-FDG PET segmentation methods to predict Large B-cell lymphoma outcomes
Kylie Keijzer,
The Netherlands
MO-0960
Abstract
Evaluating semi-automated 18F-FDG PET segmentation methods to predict Large B-cell lymphoma outcomes
Authors: Kylie Keijzer1, Tom van Meerten2, Janneke W. de Boer2, Anne G. H. Niezink3, Lisanne V. van Dijk3
1University Medical Center Groningen (UMCG), Haematology | Radiation Oncology, Groningen, The Netherlands; 2University Medical Center Groningen (UMCG), Haematology, Groningen, The Netherlands; 3University Medical Center Groningen (UMCG), Radiation Oncology, Groningen, The Netherlands
Show Affiliations
Hide Affiliations
Purpose or Objective
Patients with Large B-cell Lymphoma (LBCL) are treated with a combination of immune-chemotherapy and radiotherapy, and approximately 60% of the patient are cured with this strategy. Treatment response assessment is performed using 18F-FDG PET/CT scans by applying a visual scoring system (Deauville-score). The metabolic active tumor volume (MATV), which is not implemented in the Deauville-score, is a known predictor of treatment outcomes. MATV delineation is labor-intensive in LBCL, as the disease is often widespread through the body with nodal and extranodal involvement, and with a wide range in tumor volumes. In addition, delineation of MATV is not a standard procedure in the response assessment of LBCL patients. Multiple semi-automated SUV thresholding methods are used in research practice. However, it is currently unclear which thresholding method is optimal for prediction of treatment outcome.
The aim of this study was to develop a semi-automatic multi-threshold PET segmentation approach, to extract MATVs with a one-click-per-lesion approach in a publicly accessible software tool, and evaluate the methods in a LBCL patient cohort.
Material and Methods
A software tool was developed as an extension for 3D Slicer, where tumor locations are identified by placing seed-points on the PET images, followed by subsequent region growing. Based on previous studies, selected SUV thresholding methods included fixed, relative and majority voting based methods. MATVs were extracted from the resulting segmentations.
Our software tool was utilized in a use-case cohort of 68 patients with LBCL. Significant differences in MATVs between the SUV thresholding methods were assessed with paired t-tests. Kaplan-Meier analysis was used on a sub-selection of 50 patients, of which a pre-treatment PET/CT was available, to estimate 2-year overall survival (OS), for low (< 200 cc) and high (≥ 200 cc) MATV groups.
Results
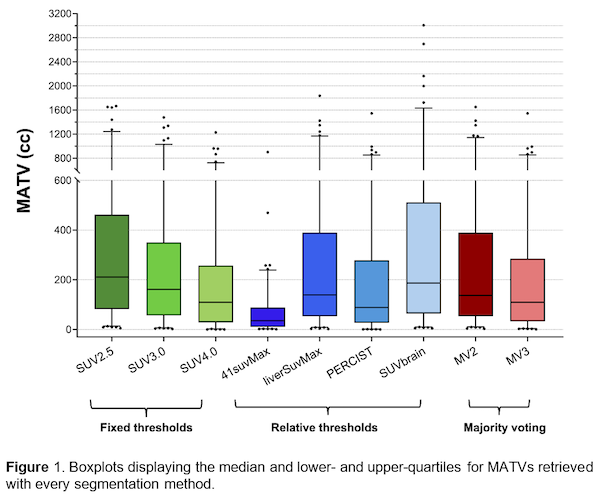
Nine SUV thresholding methods were identified and selected. High variability was observed for MATVs extracted with our software tool and significantly differed between segmentation methods (p < 0.05) (Figure 1). Median MATVs ranged from 35 to 211 cc, where most variability was observed between relative SUV thresholding methods.
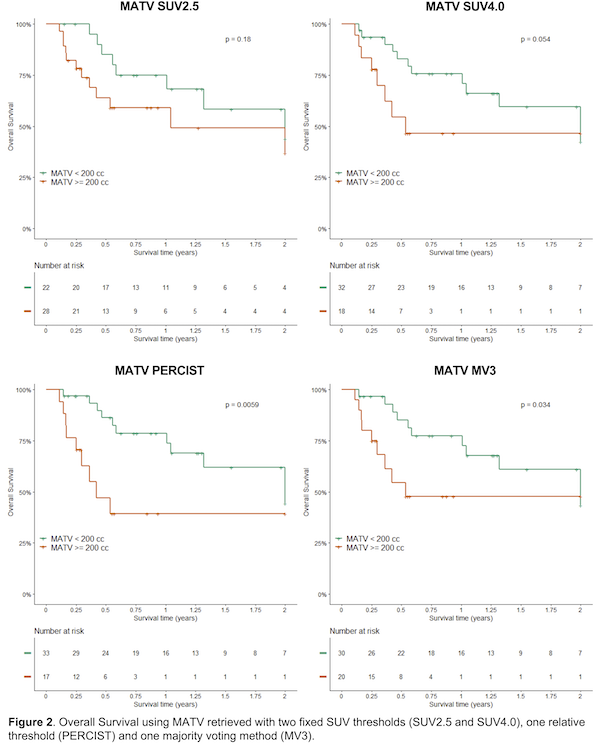
Contribution of MATV to overall survival (OS) prediction differed between SUV threshold methods using the same cut-off (Figure 2). MATV of 2 fixed methods did not significantly associate with OS (log-rank p-value < 0.05). The MATV retrieved with a relative- and a majority voting method did significantly associate with OS (p = 0.0059 for PERCIST, p = 0.034 for MV3).
Conclusion
No consensus for determining MATV is available based on the literature. Using our software tool with 9 SUV thresholding methods, we demonstrated that there is a large variation in MATVs and, moreover, that their predictive performance of survival differed. Identifying the most optimal segmentation method for outcome prediction with MATV is essential in patients with LBCL.